

















关注微信公众号
获取最新资讯


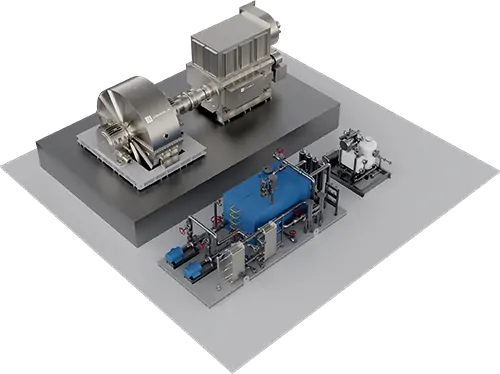
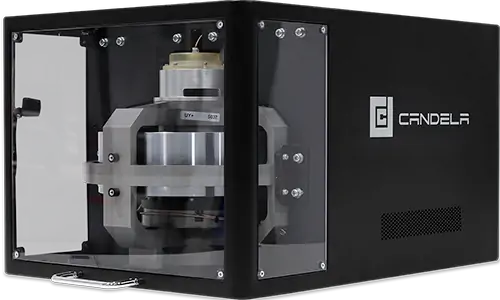
坎德拉新能源基于磁悬浮飞轮控制核心技术,自主创新研发的 磁悬浮控制教学实验平台,可以在Matlab®/Simulink®中进行 算法模型搭建,通过灵活的设计和调整磁悬浮轴承、电机控制 等相关参数,直接生成代码并烧录至DSP芯片中,实现快速验证 控制算法和相关试验数据,为磁悬浮轴承控制系统和电机矢量 控制系统的理论学习和教学实践提供了一种新方式。
系统化的实验项目配备了内容丰富的互动式实验教学软件,详实 的多媒体实验指导手册和实验设备,让实验学习过程变得轻松有趣。
| 额定功率 | 200W |
| 有效容量 | 2Wh |
| 工作转速区间 | 0-6000rpm |
| 电源接口 | 单相220VAC,50Hz |
| 人机界面 | 10英寸触摸屏,HDMI |
| 工作温度 | -20℃~50℃ |
| 重量 | 40kg |
| 尺寸(W*D*H) | 550mm* 400mm* 330mm |
| 防护等级 | IP20 / 外置金属防护壳 |
| 冷却方式 | 自然冷却 |
| 飞轮材质 | 合金钢 |
| 紧急停机功能 | 具备 |

理论与实验结合,以图形化的方式呈现,让学生在课程学习和实验过程中得到沉浸式教学体验

提供硬件平台和仿真平台的互通互联,在Matlab®/Simulink®中基于MBD的理念实现复杂控制模型的快速仿真

覆盖磁悬浮飞轮储能专业课程教学实验,磁悬浮轴承控制系统、电机矢量控制系统各类教学仿真实验
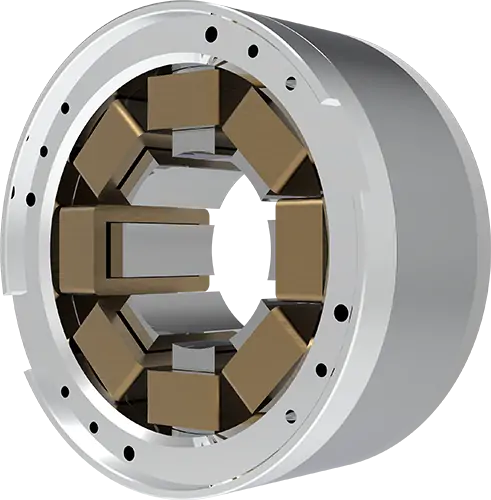
坎德拉新能源磁悬浮飞轮控制教学实验平台,可用于学习磁悬浮控制标准流程:电流开环、电流闭环、位置标定、五轴静浮、悬浮升速等内容,实现磁悬浮轴承控制系统理论学习和教学实践, 具有操作简便和快速仿真等特性。
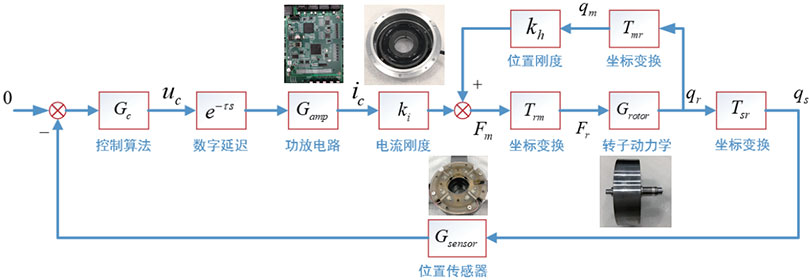
磁悬浮轴承控制系统框图
1、磁悬浮控制原理学习
磁悬浮控制技术原理知识介绍,结合沉浸式教学软件,快速掌握基础基础理论知识
2、数字建模与离线仿真
学习Matlab®/Simulink®的使用,建立时域动力学建模和复域传递函数,建立相应的离线仿真模型
3、熟悉操作调试流程
依次熟悉电流开环、电流闭环、位置标定、五轴静浮、悬浮升速操作调试
4、MBD开发实验
磁悬浮控制算法及电机控制算法可基于模型开发(MBD)方法实现自由编程, 在Matlab®/Simulink®中进行建模仿真,然后将生成的代码程序写入驱动控制器中
5、上位机监测
上位机通过通信接口监视教学飞轮实验系统的状态,并支持在线调参、启停控制、运行数据存储等功能
6、实验数据分析
通过专用实时数据采集器保存实时数据,实现在线FFT分析、轴心轨迹记录等功能,有效分析磁轴承控制效果,加快控制算法开发进度
| 1、磁轴承线圈开环正、负电流实验 | 8、五轴悬浮下的位置信号FFT实验 |
| 2、磁轴承线圈闭环正、负电流实验 | 9、五轴悬浮下的闭环扫频实验 |
| 3、轴向Z轴标定实验 | 10、PID参数调整对五轴悬浮效果的影响实验 |
| 4、轴向Z轴悬浮实验 | 11、陷波器参数调整对五轴悬浮效果的影响实验 |
| 5、径向X、Y轴标定实验 | 12、五轴悬浮升速及轴心轨迹观测实验 |
| 6、径向UX、UY、DX、DY路悬浮实验 | 13、交叉控制参数抑制陀螺效应实验 |
| 7、一键五轴悬浮实验 | 14、一键起浮、升速充电、减速放电综合实验 |




关注微信公众号
获取最新资讯

扫描获取最新版
产品手册

点击查看
更多视频